Stack
01 · Three primitives, one pipeline
01 / Dense Action Labels
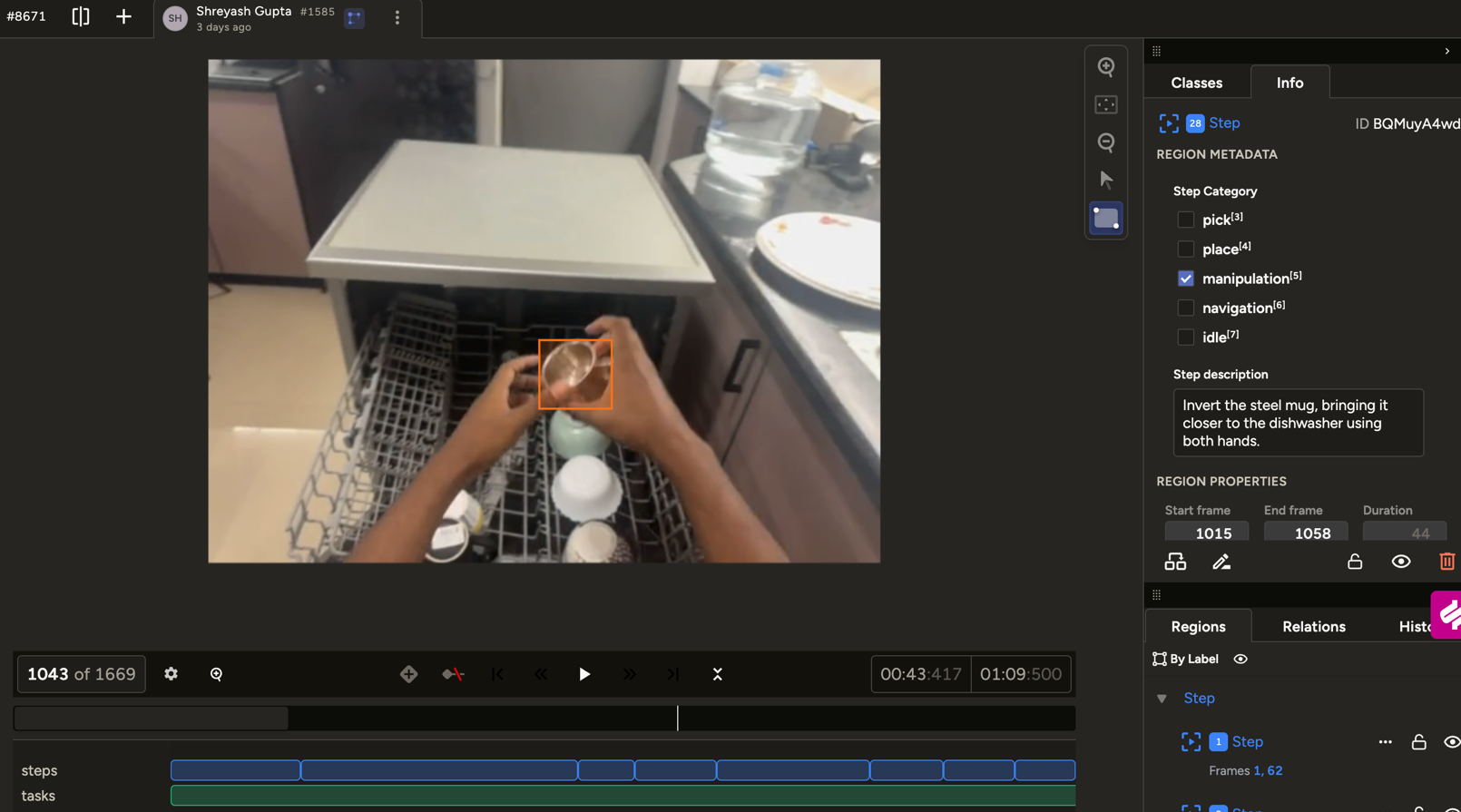
Dense action labels
Frame-accurate action segmentation over long-horizon manipulation. Scene context, object state, and contact sequences, annotated as the model will consume them.
Frame-accurate · scene-grounded
02 / 2D → 3D Hand Tracking
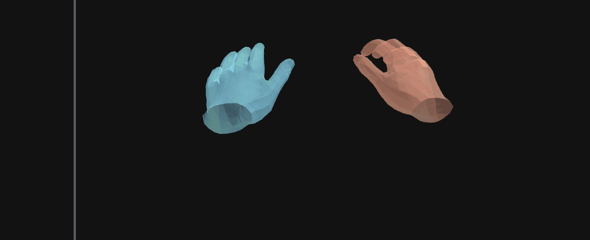
2D → 3D hand tracking
Millimeter-level 3D hand reconstruction from 2D egocentric video. Stable under self-occlusion and close-range object interaction, the regime where off-the-shelf pose fails.
mm-level · occlusion-stable
03 / 2D → 3D Body Pose
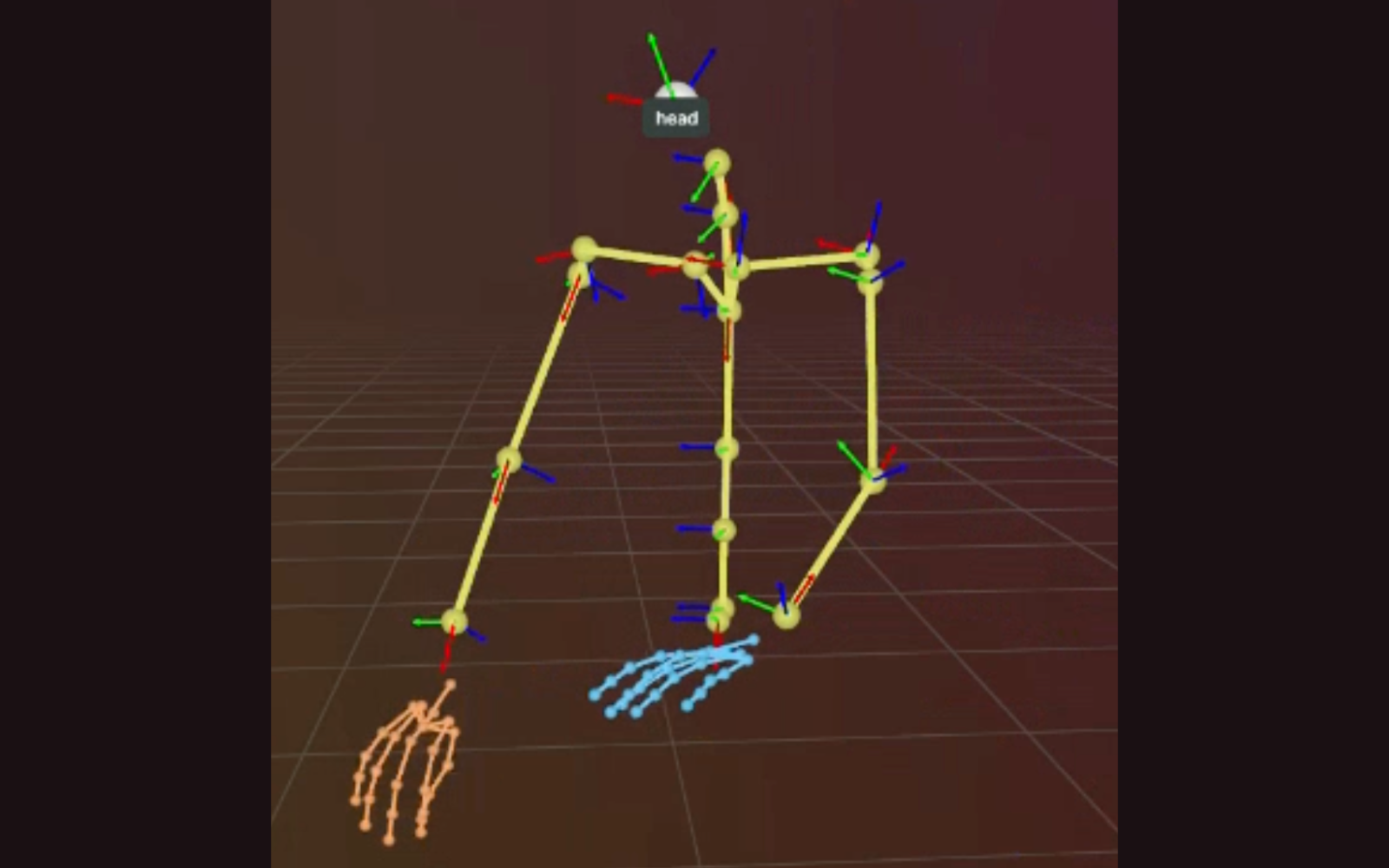
2D → 3D body pose
Full-body pose reconstruction from a single egocentric camera. Physics-aware, temporally smooth, with root trajectory, the rig a policy can actually consume.
physics-aware · temporally grounded